DS04-NFC 360度回転サーボを調べてみました
以前、Amazonで購入した廉価なステップモータはギア比が大きく、模型の車に
使う時は径の大きいタイヤが必要かと思い、AmazonとeBayを調べていたら
少し大きいタイヤ付きの360度回転サーボが有ったので、値段が少し高かった
のですが購入して見ました。付属のタイヤはステップモータ用に使って、少し速度を
稼ぐ事ができたので、次にサーボ本体も調べて見ました。サーボに関しては、
回転位置をコントロールするものと思っていましたが、このサーボでは位置制御と
同じパルス形式を利用して、回転速度と方向を制御するものでした。
調べて見て感じたのは、このサーボは速度の可変範囲も広く、また十分な速度と
力が得られるので非常に利用しやすい事でした。ただし、値段が一つ千円位なのが
残念な点でした。(左右で2千円) 以下が調べた状況です。
<DS04-NFCの概要>
購入したスサーボは連続回転可能なもので、次の様なものでした。
[デバイスの概要]


1.サーボ形式のパルス制御で回転方向と回転速度をコントールするもの
2.2.0mS : CW (turn right), 1.5mS : Stop, 1.0mS : CCW (turn left)
(1.5mS を中心に右回りと左回りが速度の変化を伴って連続で可変)
3.仕様
- Weight: 38g.
- Dimensions: 40.8 x 20 x 39.5 mm.
- Torque: 5.5kg/cm (at 4.8V).
- Speed: 0.22sec/60 C (at 4.8V).
- Operating voltage: 4.8v-6v.
- Operating temperature: 0 C -60 C.
- Current:< 1000mA.
[動作検証]
1.2つのサーボを用意して模型の車を動かす
2.サーボの制御は WeMos D1 を利用する
3.制御対象は、左右のサーボによるタイヤの制御
4.コントロールはスマホからWiFi経由で行う
[動作状況]
<関連資料>
サーボのコントロールに関しては次のものを参考にしました。
URL : http://www.arduinogeek.com/2016/12/how-to-control-ds04-nfc-servo-with.html
WeMos D1で利用しているWebSocketのライブラリは次のものを使っています。
URL : https://github.com/Links2004/arduinoWebSockets
<テスト内容と結果>
今回も、I2CのI/O Expanderの時と同様に、手作りの模型の車を用意して、
駆動部分をこのサーボにして、それをスマホからコントロールする事にして
行いました。
1.手作りの模型の車をこのサーボで動く様にして、それをスマホから制御
2.制御内容は、モータの回転速度と回転方向、サーボコントール用の
スライドバーには、右、左、両方の3つ用意してそれで対応
動作させた結果としては、次の様なものでした。
1.スマホからの制御に関しては、目標通りに回転方向および回転速度を
制御する事が出来ました。
2.速度に関しても、模型の車としては十分実用的なものとなる事が
判りました。
3.ただし、左右2つのサーバには性能差が有り、直線走行させるには、
左右のサーボの設定値を適時調整する必要が有りました。
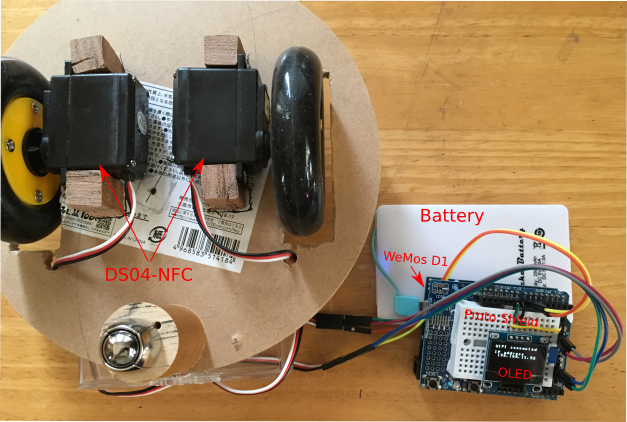
[テストでの機器の接続]


[コード類]
テストに使用したコード類は次のURLからダウンロード可能です。
Code download URL : https://www.dropbox.com/s/pbzsgz00iqpx0e4/DS04-NFC_test.zip?dl=0
使う時は径の大きいタイヤが必要かと思い、AmazonとeBayを調べていたら
少し大きいタイヤ付きの360度回転サーボが有ったので、値段が少し高かった
のですが購入して見ました。付属のタイヤはステップモータ用に使って、少し速度を
稼ぐ事ができたので、次にサーボ本体も調べて見ました。サーボに関しては、
回転位置をコントロールするものと思っていましたが、このサーボでは位置制御と
同じパルス形式を利用して、回転速度と方向を制御するものでした。
調べて見て感じたのは、このサーボは速度の可変範囲も広く、また十分な速度と
力が得られるので非常に利用しやすい事でした。ただし、値段が一つ千円位なのが
残念な点でした。(左右で2千円) 以下が調べた状況です。
<DS04-NFCの概要>
購入したスサーボは連続回転可能なもので、次の様なものでした。
[デバイスの概要]
1.サーボ形式のパルス制御で回転方向と回転速度をコントールするもの
2.2.0mS : CW (turn right), 1.5mS : Stop, 1.0mS : CCW (turn left)
(1.5mS を中心に右回りと左回りが速度の変化を伴って連続で可変)
3.仕様
- Weight: 38g.
- Dimensions: 40.8 x 20 x 39.5 mm.
- Torque: 5.5kg/cm (at 4.8V).
- Speed: 0.22sec/60 C (at 4.8V).
- Operating voltage: 4.8v-6v.
- Operating temperature: 0 C -60 C.
- Current:< 1000mA.
[動作検証]
1.2つのサーボを用意して模型の車を動かす
2.サーボの制御は WeMos D1 を利用する
3.制御対象は、左右のサーボによるタイヤの制御
4.コントロールはスマホからWiFi経由で行う
[動作状況]
<関連資料>
サーボのコントロールに関しては次のものを参考にしました。
URL : http://www.arduinogeek.com/2016/12/how-to-control-ds04-nfc-servo-with.html
WeMos D1で利用しているWebSocketのライブラリは次のものを使っています。
URL : https://github.com/Links2004/arduinoWebSockets
<テスト内容と結果>
今回も、I2CのI/O Expanderの時と同様に、手作りの模型の車を用意して、
駆動部分をこのサーボにして、それをスマホからコントロールする事にして
行いました。
1.手作りの模型の車をこのサーボで動く様にして、それをスマホから制御
2.制御内容は、モータの回転速度と回転方向、サーボコントール用の
スライドバーには、右、左、両方の3つ用意してそれで対応
動作させた結果としては、次の様なものでした。
1.スマホからの制御に関しては、目標通りに回転方向および回転速度を
制御する事が出来ました。
2.速度に関しても、模型の車としては十分実用的なものとなる事が
判りました。
3.ただし、左右2つのサーバには性能差が有り、直線走行させるには、
左右のサーボの設定値を適時調整する必要が有りました。
[テストでの機器の接続]
[コード類]
テストに使用したコード類は次のURLからダウンロード可能です。
Code download URL : https://www.dropbox.com/s/pbzsgz00iqpx0e4/DS04-NFC_test.zip?dl=0