Chinese 2WD robot car kit 調べて見ました
Amazonに中国製の安い2WD robot car kit を売っていたので、購入して見ました。
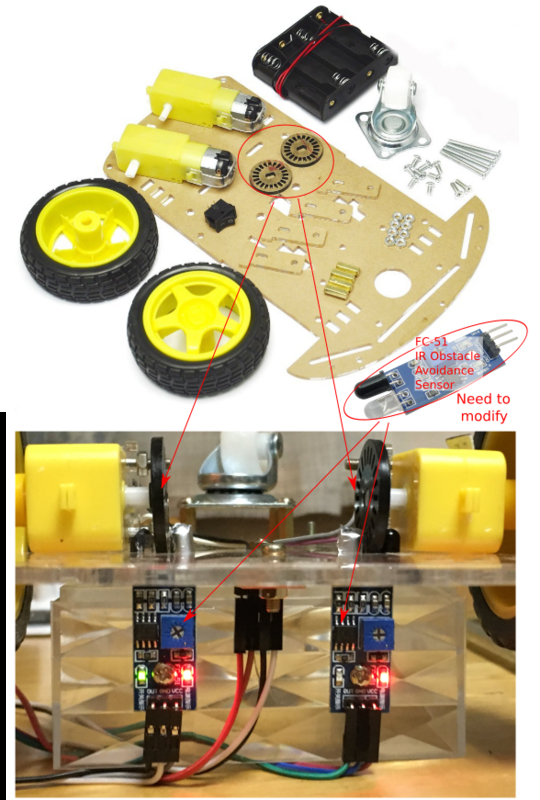
キットの中には回転センサー用の円盤も用意されており、それと以前に調べた
赤外線の障害物センサーを改造したものと組み合わせて回転センサー付きのものに
して動作の状況を確認しました。結果的にはモータの性能が悪く、色々検討しても
十分満足な結果がでるものでは無かったのですが、取り敢えず纏めてみました。
その状況は次の様なものでした。
<2WD robot car kit の概要>
中国製の2WD robot car kit を購入し、回転センサ―として赤外線障害物
センサーを改造して取り付けて、WeMod D1で動かして見ました。その内容は
次の様なものでした。
1.モータ駆動用には、先のこちらの記事で記載したWeMos D1 mini motor
shieldを利用
2.付属の回転検出用の円盤には、先のこちらの記事で記載した赤外線障害物
センサーのFC-51を改造したものを利用
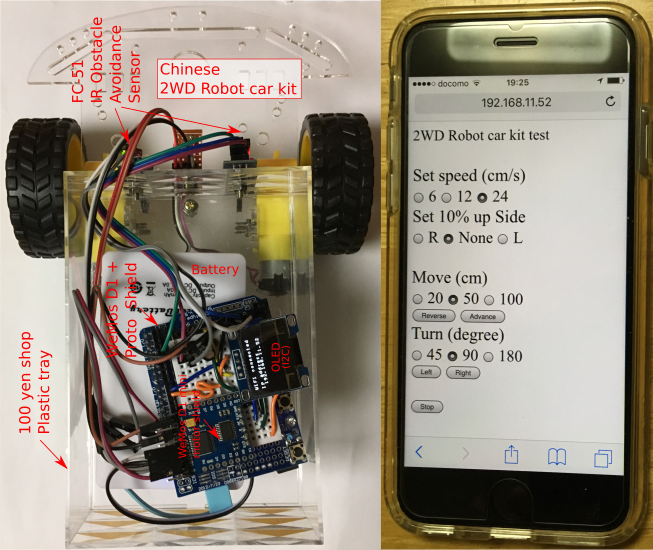
3.制御用のマイコン収納用に100円ショップで購入したプラスチックの
トレイを取り付け
4.2WD robot car のコントロールはWiFiを通してiPhoneで行う
[全体の構成]
[動作状況]
<関連資料>
WeMos D1で利用しているWebSocketのライブラリは次のものを使っています。
URL : https://github.com/Links2004/arduinoWebSockets
<FC-51の改造>
このキットの回転センサー用の円盤を利用する手段として、赤外線障害物
センサーのFC-51を改造したものを利用しました。その状況は次の様に
なります。
[改造方法]
1.まず、FC-51のLEDとセンサーの間をセンサー用円盤が入る様に距離を
離します。
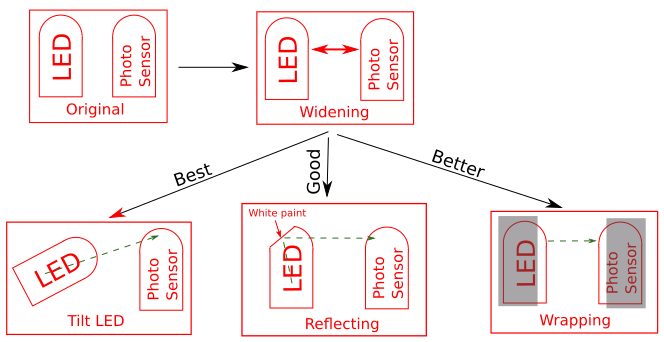
2.次に、LEDヵら発光する赤外線の経路を前方から横にする必要が有ります。 その為に次の3つの方法を検討しました。
・LEDを傾ける方法
最良の方法でしたが、取り付けが難しかったです。
・LEDを削り、削った部分に白のマーカーを塗って反射板を作る方法
集光用のレンズ部分を削って反射板とする為、反射板からの光が
拡散してしまい、センサー通過の時の穴の有無による光の変化が
弱い様で、ノイズ耐性が低い様に思われました。
・LEDとセンサーをアルミのフォイルで取り囲み、対面する部分をスリット
にする方法
この方法は、効果的でしたがアルミフォイルを取る付けるのにメカの
スキルが必要でした。
3.今回利用した方法は、当初は一番上の方法でしたが、上手く行ったので、
もう少し恰好を良くしようと思い、2番目の方法に変更しました。
その結果、モータドライブからの3.3v電源ラインへのノイズの影響を
受ける様になったので、回転検出用の円盤が通過する時の光の変化が
大きくなる様に内側に有るものにアルミフォイルを張り付けました。
メカのスキルが有れば、最初から3番目の方法にしたと思いますが、
遠回りになりました。
<注意> FC-51は電源ラインからのノイズの影響が大きい構造となって
います。電源はノイズの無い安定なものを利用して下さい。
[調整方法]
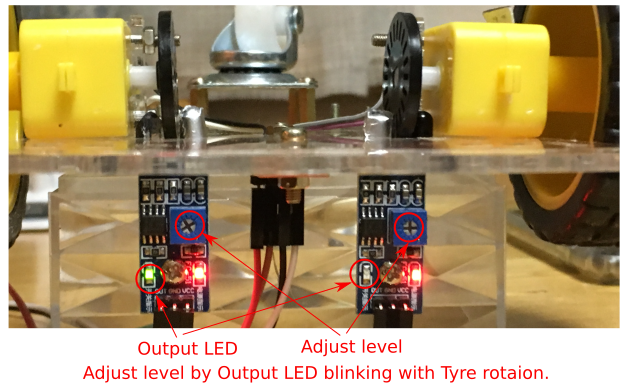
1.FC-51上のグリーンのLEDは出力のモニター用
2.その為、タイヤを手で回して、グリーンのLEDが点滅する範囲の中心に
調整を合わせる。
<テスト内容と結果>
今回の動作モデルでは、回転センサ―を利用した動作の単位を構成して、
それを組み合わせて動かす方法としました。対応する動作単位としては次の
ものを用意しました。
1.前進・後退の距離の指定を伴う直線動作
2.指定角を伴う回転動作
3.速度の指定は、3段階で、補助的に左右それぞれ個別の10%アップの
指定
動作させた結果としては、次の様なものでした。
1.モータの起動に必要な電圧が前回の停止位置により大きくバラつく為、
起動時にダミーの大きな電圧を加える必要が有り、その時の左右の
バランスを取るのがとても難しかったです。(起動時に左右の予想外の
振れが出る。)
2.その為、回転に関しては左右片側動作で対応せざるを得ませんでした。
3.モータの駆動能力が左右で大きく異なっており、調整の為の係数の
選択に時間が掛かりました。
4.モータ駆動用のドライバにモータの起動と停止を左右同時に行う機能が
無く、また、動作順の時間差の影響も大きい為、それの調整が
大変でした。(まだ完全にはできていません。)
5.その為、この形式のモータ制御に関しての勉強には適していると
思いましたが、実用には不向きだ感じました。
(この形式のモータ駆動上の問題点のほぼ全てが揃っているかと
思います。)
でも、とても安価(日本のAmazonで900円位)なので気楽に
利用可能で学習には最適?
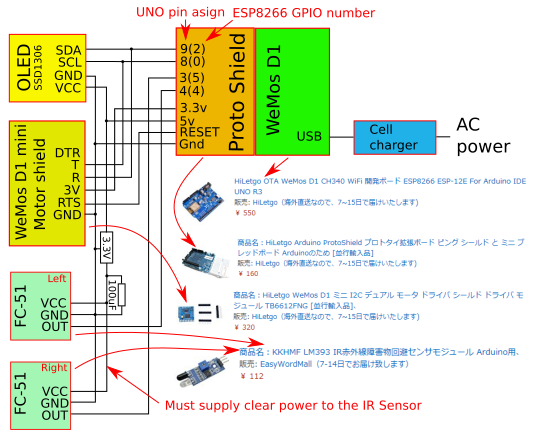
[テストでの機器の接続]
[コード類]
テストに使用したコード類は次のURLからダウンロード可能です。
Code download URL : https://www.dropbox.com/s/fnde3hgazaqnmbq/Chinese_2WD_Robot_car_kit_test2.zip?dl=0
キットの中には回転センサー用の円盤も用意されており、それと以前に調べた
赤外線の障害物センサーを改造したものと組み合わせて回転センサー付きのものに
して動作の状況を確認しました。結果的にはモータの性能が悪く、色々検討しても
十分満足な結果がでるものでは無かったのですが、取り敢えず纏めてみました。
その状況は次の様なものでした。
<2WD robot car kit の概要>
中国製の2WD robot car kit を購入し、回転センサ―として赤外線障害物
センサーを改造して取り付けて、WeMod D1で動かして見ました。その内容は
次の様なものでした。
1.モータ駆動用には、先のこちらの記事で記載したWeMos D1 mini motor
shieldを利用
2.付属の回転検出用の円盤には、先のこちらの記事で記載した赤外線障害物
センサーのFC-51を改造したものを利用
3.制御用のマイコン収納用に100円ショップで購入したプラスチックの
トレイを取り付け
4.2WD robot car のコントロールはWiFiを通してiPhoneで行う
[全体の構成]
[動作状況]
<関連資料>
WeMos D1で利用しているWebSocketのライブラリは次のものを使っています。
URL : https://github.com/Links2004/arduinoWebSockets
<FC-51の改造>
このキットの回転センサー用の円盤を利用する手段として、赤外線障害物
センサーのFC-51を改造したものを利用しました。その状況は次の様に
なります。
[改造方法]
1.まず、FC-51のLEDとセンサーの間をセンサー用円盤が入る様に距離を
離します。
2.次に、LEDヵら発光する赤外線の経路を前方から横にする必要が有ります。 その為に次の3つの方法を検討しました。
・LEDを傾ける方法
最良の方法でしたが、取り付けが難しかったです。
・LEDを削り、削った部分に白のマーカーを塗って反射板を作る方法
集光用のレンズ部分を削って反射板とする為、反射板からの光が
拡散してしまい、センサー通過の時の穴の有無による光の変化が
弱い様で、ノイズ耐性が低い様に思われました。
・LEDとセンサーをアルミのフォイルで取り囲み、対面する部分をスリット
にする方法
この方法は、効果的でしたがアルミフォイルを取る付けるのにメカの
スキルが必要でした。
3.今回利用した方法は、当初は一番上の方法でしたが、上手く行ったので、
もう少し恰好を良くしようと思い、2番目の方法に変更しました。
その結果、モータドライブからの3.3v電源ラインへのノイズの影響を
受ける様になったので、回転検出用の円盤が通過する時の光の変化が
大きくなる様に内側に有るものにアルミフォイルを張り付けました。
メカのスキルが有れば、最初から3番目の方法にしたと思いますが、
遠回りになりました。
<注意> FC-51は電源ラインからのノイズの影響が大きい構造となって
います。電源はノイズの無い安定なものを利用して下さい。
[調整方法]
1.FC-51上のグリーンのLEDは出力のモニター用
2.その為、タイヤを手で回して、グリーンのLEDが点滅する範囲の中心に
調整を合わせる。
<テスト内容と結果>
今回の動作モデルでは、回転センサ―を利用した動作の単位を構成して、
それを組み合わせて動かす方法としました。対応する動作単位としては次の
ものを用意しました。
1.前進・後退の距離の指定を伴う直線動作
2.指定角を伴う回転動作
3.速度の指定は、3段階で、補助的に左右それぞれ個別の10%アップの
指定
動作させた結果としては、次の様なものでした。
1.モータの起動に必要な電圧が前回の停止位置により大きくバラつく為、
起動時にダミーの大きな電圧を加える必要が有り、その時の左右の
バランスを取るのがとても難しかったです。(起動時に左右の予想外の
振れが出る。)
2.その為、回転に関しては左右片側動作で対応せざるを得ませんでした。
3.モータの駆動能力が左右で大きく異なっており、調整の為の係数の
選択に時間が掛かりました。
4.モータ駆動用のドライバにモータの起動と停止を左右同時に行う機能が
無く、また、動作順の時間差の影響も大きい為、それの調整が
大変でした。(まだ完全にはできていません。)
5.その為、この形式のモータ制御に関しての勉強には適していると
思いましたが、実用には不向きだ感じました。
(この形式のモータ駆動上の問題点のほぼ全てが揃っているかと
思います。)
でも、とても安価(日本のAmazonで900円位)なので気楽に
利用可能で学習には最適?
[テストでの機器の接続]
[コード類]
テストに使用したコード類は次のURLからダウンロード可能です。
Code download URL : https://www.dropbox.com/s/fnde3hgazaqnmbq/Chinese_2WD_Robot_car_kit_test2.zip?dl=0